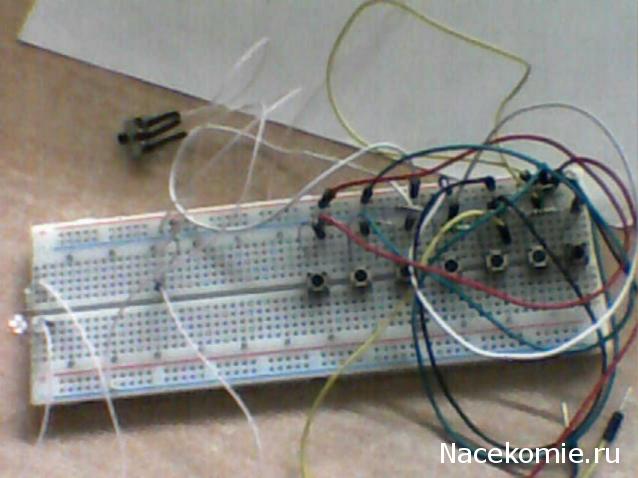
Вариант программируемого робота на робото-шасси "Робот-шпион"
Вариант программируемого робота на робото-шасси "Робот-шпион"
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Вариант программируемого робота на робото-шасси "Робот-шпион"
Вариант программируемого робота на робото-шасси "Робот-шпион"
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




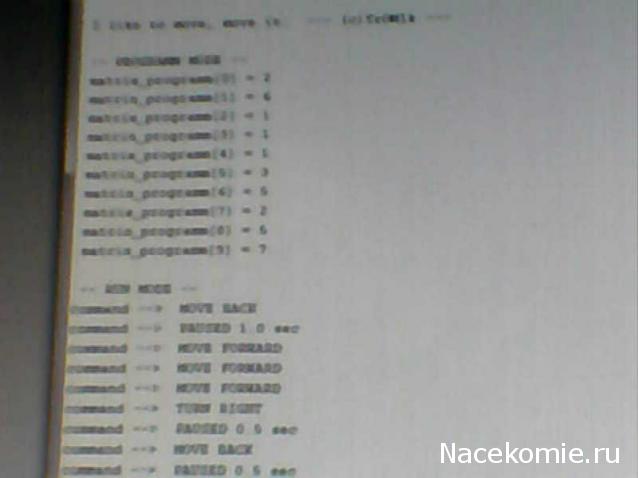

 YrOM1k.
YrOM1k.
 но это уже совсем другая история
но это уже совсем другая история



