Зарегистрирован: 18 июл 2010, 18:17 Сообщения: 1545 Откуда: Ростовская обл. г. Волгодонск
Робот-шпион. Сборка робота. Электронные платы
Обсуждение электронных плат.
22 мар 2012, 07:07
Спонсор
Bee
Зарегистрирован: 10 фев 2012, 12:43 Сообщения: 80 Откуда: Москва
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Paneg писал(а):
... меня вот волнует как он, не дай баг, будет спускаться с наклонной поверхности?
Навели на мысль! Нельзя будет поворачивать на большой угол при достаточно крутом спуске. Потому что, когда хвост выйдет за пределы одного из колес (за вертикали, проходящие через центры колес), робота просто развернет. Имхо. Интересно попробовать.
04 апр 2012, 12:11
TheTERMINATOR
Зарегистрирован: 29 мар 2012, 11:54 Сообщения: 766 Откуда: Москва
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Крайне огорчило качество монтажа платы управления двигателями.
Чем они ее паяли?! Флюс от навесного не отмыт, качество пайки напоминает работу ПТУшников. Плата чем-то конкретно пошкрябана. Ни разу не видел на китайских платах такой похабщины...
13 апр 2012, 07:32
YrOM1k
Зарегистрирован: 21 апр 2011, 08:38 Сообщения: 75 Откуда: Воронеж
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Пока вот так : распиновка и плата -
Vss подтянуто к шине - DATA и CLOCK через какие-то резисторы...
P.S. Не благодарная это работа трезвоном заниматься...IMHO
15 апр 2012, 16:03
dmitryp
Зарегистрирован: 27 фев 2012, 14:22 Сообщения: 27 Откуда: Москва
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
YrOM1k писал(а):
Vss[/color] подтянуто к шине - DATA и CLOCK через какие-то резисторы...
я тоже чуть чуть порисовал clock не нашел что он притянут.
Зарегистрирован: 29 мар 2012, 11:54 Сообщения: 766 Откуда: Москва
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Однако, слухи о отсутствии в продаже 12 выпуска - правда. Хотел купить плату, сдуть с нее все и срисовать схему - не смог купить...
16 апр 2012, 07:51
rubra
Зарегистрирован: 04 мар 2012, 01:25 Сообщения: 373
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
TheTERMINATOR писал(а):
Однако, слухи о отсутствии в продаже 12 выпуска - правда. Хотел купить плату, сдуть с нее все и срисовать схему - не смог купить...
...Ну всё очень похоже на другой партворк, танк Тигр, в продаже есть всегда свежий номер, а старых нет... ...Завтра вторник, микруха пойдёт, не пропусти
16 апр 2012, 09:25
TheTERMINATOR
Зарегистрирован: 29 мар 2012, 11:54 Сообщения: 766 Откуда: Москва
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
rubra писал(а):
в продаже есть всегда свежий номер, а старых нет... ...Завтра вторник, микруха пойдёт, не пропусти
Прошлый 11 выпуск лежит...
Микруху не пропущу, мне в палатке откладывают, договорился.
16 апр 2012, 09:33
intel
Зарегистрирован: 20 апр 2012, 09:50 Сообщения: 14
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
есть возможность прикупит еще одну плату в продаже есть номера 12-е есть паяльный фен чтобы все здуть если хотите замарочится могу зделать и выложить сканы с плат
20 апр 2012, 15:55
emax
Зарегистрирован: 12 апр 2012, 17:28 Сообщения: 41 Откуда: Пермь
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
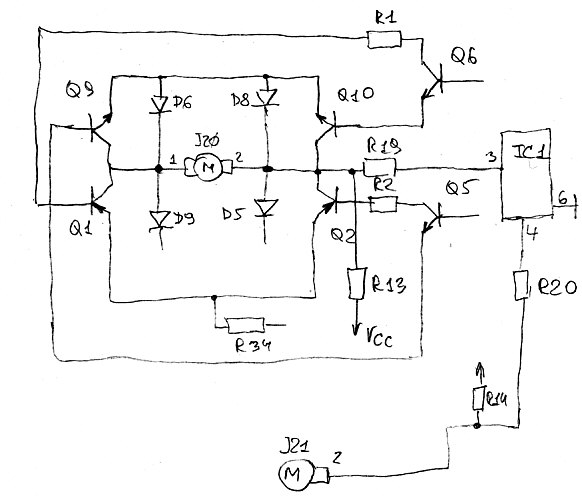
из соседней темы.... схема первой платы, критика и исправление ошибок принимаются
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
А какие команды удалось вычислить? Напишите команды I2C. Процессор по ходу вот этот EM78P159NAS. Он точно OTP то есть одноразовый.
20 апр 2012, 17:29
dmitryp
Зарегистрирован: 27 фев 2012, 14:22 Сообщения: 27 Откуда: Москва
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Alarus писал(а):
. Процессор по ходу вот этот EM78P159NAS.
на 3 и 4 ножке дожен быть АЦП так что более похоже на EM78P374
20 апр 2012, 18:38
emax
Зарегистрирован: 12 апр 2012, 17:28 Сообщения: 41 Откуда: Пермь
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
dmitryp писал(а):
на 3 и 4 ножке дожен быть АЦП так что более похоже на EM78P374
даташит имеется? нашел... не оно, у нее есть аппаратный I2C, но не на тех выводах. Если только I2C в роботе не программный...
20 апр 2012, 18:52
greenrat
Зарегистрирован: 27 янв 2012, 20:32 Сообщения: 34
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Как только появится вторая платка с контроллером - тогда и надо будет снифирить I2C а пока - это только пальцем тыкать в небо)
20 апр 2012, 21:23
myp
Зарегистрирован: 10 мар 2012, 12:49 Сообщения: 1
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Это точно - второй контроллер как раз и будет Master шины I2C, значит будет генерить адреса, синхро и организовывать обмен. По крайней мере так из анонса следует. А связь с радиомодулем будет по шине SPI.
20 апр 2012, 21:41
intel
Зарегистрирован: 20 апр 2012, 09:50 Сообщения: 14
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
наиболее интересный узел здесь не дистанционное управление а сканирующий лидар я только на него и повелся когда решал собирать или нет робота
22 апр 2012, 04:44
DanilinS
Зарегистрирован: 16 апр 2012, 21:04 Сообщения: 78 Откуда: г. Дзержинск Нижегородской обл
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
emax писал(а):
из соседней темы.... схема первой платы, критика и исправление ошибок принимаются
Добавлено спустя 3 минуты 52 секунды: начал разбираться с протоколом I2C.... пока нашел только команды реверса для каждого из двигателей....
Критика схемы: разьемы желательно подписать. Компоновка схемы немного "режет глаз", но это просто мое "старческое" ворчание
Насчет АЦП (3,4) - немного непонятна логика работы. Может схема немного неверно разрисована? По логике в цепи мотора должно быть низкоомное сопротивление, сигнал с которого идет на АЦП. Именно так и должна быть реализована защита. Обычно оно ставится в точку соединения нижних транзисторов с землей. Может низкоомное сопротивление приняли при прозвонке за дорожку? Или данное сопротивление реализовано "конструктивно" ? В виде тонкого участка дорожки?
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
intel писал(а):
наиболее интересный узел здесь не дистанционное управление а сканирующий лидар я только на него и повелся когда решал собирать или нет робота
Да что -то он у него какой-то плешивый до 0.5 метра и непонятно измеряет ли он расстояние или это просто датчик препятствия на моторчике.
22 апр 2012, 12:00
DanilinS
Зарегистрирован: 16 апр 2012, 21:04 Сообщения: 78 Откуда: г. Дзержинск Нижегородской обл
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
Обычный ультразвуковой датчик растояния. Типа такого (HC-SR04) (или аналог)
Спецификация: напряжение питания: 5 В потребляемый ток: <2 мА эффективный угол: <15° измеряемое расстояние: 2 см...500 см точность: 0,3 см
Стоит на серве, которая его поворачивает в разные стороны.
Из минусов: хорошо видят только плоские перпендикулярные плоскости. Плоскость "под углом" видят гораздо хуже, так как отраженный импульс уходит в сторону. Аналогично плохо видит поглощающие или прозрачные для ультразвука препятстия. Например шторы или ковер на стене.
Котов практически не видит из-за особенностей камуфляжа Хотя для сфинксов или короткошерстных может и исключение.
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
DanilinS писал(а):
Обычный ультразвуковой датчик растояния. Типа такого (HC-SR04) (или аналог)
Спецификация: напряжение питания: 5 В потребляемый ток: <2 мА эффективный угол: <15° измеряемое расстояние: 2 см...500 см точность: 0,3 см
Стоит на серве, которая его поворачивает в разные стороны.
Из минусов: хорошо видят только плоские перпендикулярные плоскости. Плоскость "под углом" видят гораздо хуже, так как отраженный импульс уходит в сторону. Аналогично плохо видит поглощающие или прозрачные для ультразвука препятстия. Например шторы или ковер на стене.
Котов практически не видит из-за особенностей камуфляжа Хотя для сфинксов или короткошерстных может и исключение.
Обломитесь, внимательно читаем 3 номер 7 страница один из дезориентирующих факторов зеркало. Соответственно датчик ИК пара.
22 апр 2012, 17:49
intel
Зарегистрирован: 20 апр 2012, 09:50 Сообщения: 14
Re: Робот-шпион. Сборка робота. Этап 8. Электронные платы
нет ультразвуковой сонар был в прежнем роботе куботе в этом писали что будет инфракрасный сканирующий лидар так что скорее будет ик дальномер типо шарпавской сборки он тоже кстати только на пол метра бьет сервы боюсь тоже не будет зато будет механический привод со своими шестерёнками своим оптическим датчиком угла поворота и своим моторчиком если приглядеться то на колесике с прорезями как у мышки даже нулевая отметка есть для синхронизации и у этой штуки судя по всему будет отдельный мозг так что выпусков 20 как минемум мы будем собирать эту систему
Последний раз редактировалось intel 23 апр 2012, 10:18, всего редактировалось 1 раз.
Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять Фото








 Хотя для сфинксов или короткошерстных может и исключение.
Хотя для сфинксов или короткошерстных может и исключение.{kind=link}