Как бы мы не строили догадки по тому как алгоритм работает самое главное он не исправляет ошибки в механике. Все наше изменение конструкции абсурдно. Робот будет работать ездить, а механика изнашиваться. Нам постоянно придется подкладывать пластинки или менять смазку разбирая всего робота?
Электроника и ПО должно изменять, регулировать выходные параметры исполнительных систем. Если они этого не делают зачем они нужны. Датчик угла колеса должен передавать позицию. Датчик ЭДС - усилие вращения колеса. На базе этих датчиков можно строить сложные алгоритмы поведения робота (от определения позиции до обнаружения объектов и их объезда). Без датчиков моторы можно просто включать по времени эффект будет одинаковый.
Надеюсь разработчики исправят прошивку контроллера иначе придется городить свой контроллер и свою плату.
01 янв 2013, 22:03
NeON
Зарегистрирован: 14 окт 2012, 19:15 Сообщения: 56 Откуда: Киев, Украина
Re: Робот-шпион. Двигатель и механика
Не хочу казаться самым умным, но ИМХО, самая проблемная часть конструкции ходовой - "задний шарик". Эта заррррраза ТАК ГРЕМИТ, что это не шпион, а отвлекающий манёвр, блин..
02 янв 2013, 11:56
vladimirdan
Зарегистрирован: 12 май 2012, 13:37 Сообщения: 924
Re: Робот-шпион. Двигатель и механика
Осторожно с высказываниями, а то в комплект ещё выложат нам коврик-подстилку и домик для .....
02 янв 2013, 12:47
NeON
Зарегистрирован: 14 окт 2012, 19:15 Сообщения: 56 Откуда: Киев, Украина
Re: Робот-шпион. Двигатель и механика
vladimirdan писал(а):
Осторожно с высказываниями, а то в комплект ещё выложат нам коврик-подстилку и домик для .....
Эти могут))). И обзовут глушителем. Буду менять этот шарик нафиг.
02 янв 2013, 12:58
TheTERMINATOR
Зарегистрирован: 29 мар 2012, 11:54 Сообщения: 766 Откуда: Москва
Re: Робот-шпион. Двигатель и механика
Не суетись. Когда появится хвостовое оборудование, все громыхания пройдут.
02 янв 2013, 15:38
vladimirdan
Зарегистрирован: 12 май 2012, 13:37 Сообщения: 924
Re: Робот-шпион. Двигатель и механика
Что Вы хотите этим сказать?
02 янв 2013, 16:46
NeON
Зарегистрирован: 14 окт 2012, 19:15 Сообщения: 56 Откуда: Киев, Украина
Re: Робот-шпион. Двигатель и механика
TheTERMINATOR писал(а):
Не суетись. Когда появится хвостовое оборудование, все громыхания пройдут.
Не пройдут. Возьмите шарик от подшипника, и покатайте по ровному столу.
02 янв 2013, 22:50
TheTERMINATOR
Зарегистрирован: 29 мар 2012, 11:54 Сообщения: 766 Откуда: Москва
Re: Робот-шпион. Двигатель и механика
У меня нет проблем с громыханием шарика на обоих своих роботах.
У меня робот шпион не следует за маяком. Постоянно поворачивает налево при этом горит зеленый светодиод на левой стороне. У всех так или только у меня?
03 янв 2013, 19:40
vladimirdan
Зарегистрирован: 12 май 2012, 13:37 Сообщения: 924
Re: Робот-шпион. Двигатель и механика
А в режиме поиска объекта при помощи лидара нормально работает?
В режиме поиска объекта тоже поворачивает налево, но объект не ищет. Странно все это до этого все прекрасно работало. Где копать если не работает поворот на право по лидару.
Вопрос решен оказалось что проводок от датчика угла лидара поворота отвалился (китайская сборка и хиленькие провода) после не большого ремонта все заработало . Вопрос закрыт.
03 янв 2013, 20:43
NeON
Зарегистрирован: 14 окт 2012, 19:15 Сообщения: 56 Откуда: Киев, Украина
Re: Робот-шпион. Двигатель и механика
TheTERMINATOR писал(а):
У меня нет проблем с громыханием шарика на обоих своих роботах.
А ведь действительно, с учетом конструкции узла хвостового шарика (энто ж вылитый подшипник), собственно шарик могли бы и обрезинить. На мышезаврах долазерной эпохи работало же все, и никто не жаловался, что мыша по столу тарахтит...
04 янв 2013, 08:32
vladimirdan
Зарегистрирован: 12 май 2012, 13:37 Сообщения: 924
Re: Робот-шпион. Двигатель и механика
Цельнометаллический шарик надёжнее, чем резина. Пару раз китайскую резинку спиртом протёрли и она усохла или треснула, или эластичность птеряла, или постоял месяц и деформировался и перестал прокручиваться..... Да и от времени она сама может выйти из строя. С учётом механических нагрузок на подшипник металлический шарик будет надёжнее
Добавлено спустя 3 минуты 2 секунды: В шариковых мышках на шарик нагрузки не было
Цельнометаллический шарик надёжнее, чем резина. Пару раз китайскую резинку спиртом протёрли и она усохла или треснула, или эластичность птеряла, или постоял месяц и деформировался и перестал прокручиваться..... Да и от времени она сама может выйти из строя. С учётом механических нагрузок на подшипник металлический шарик будет надёжнее
Молодой человек, я сказал не резиновый, а обрезинненый. Тут есть небольшая, как мне немного кажется , разница. И, как бы между прочим, Вы, простите, этот шарик хоть раз в руках держали? Моё субъективное мнение, что нет... Уж извините, если что не так сказал.
Добавлено спустя 3 минуты 2 секунды: В шариковых мышках на шарик нагрузки не было[quote] Ну да, не было. А о какой нагрузке Вы говорите? О статической, или динамической? Вы, извините, помните X-Wing и Tie-Fighter? И после нескольких боёв шарик от мышки в аут отправлялся? Да не было с ним ничего, непрошибаемый он. А резинки китайские покупать не надо.
04 янв 2013, 17:11
vladimirdan
Зарегистрирован: 12 май 2012, 13:37 Сообщения: 924
Re: Робот-шпион. Двигатель и механика
Ваше субъективное мнение ошибочное. Насчёт нагрузки: и той, и другой по сравнению с Роботом шпионом, поскольку мышек по конструкции повторяющей Робота-шпиона не встречал. Насчёт разницы резиновый или обрезиненный: для заклинивания подшипника в целом без разницы, что деформируется, главное, что резина быстрее выйдет, чем наш металлический шарик. Если Вы считаете наоборот, то наверное Вы имели в виду какие-то космические технологии, просьба о них сообщить
04 янв 2013, 21:32
NeON
Зарегистрирован: 14 окт 2012, 19:15 Сообщения: 56 Откуда: Киев, Украина
Re: Робот-шпион. Двигатель и механика
Разобрал 3 шариковые мышки - ни один не подходит. Вывод - буду ставить модельное подруливающее колесо. Ибо гремит он на моей пересечённой местности.
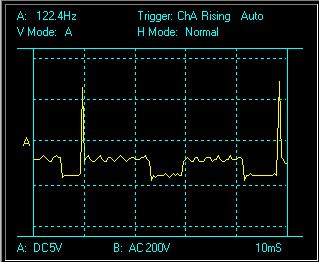
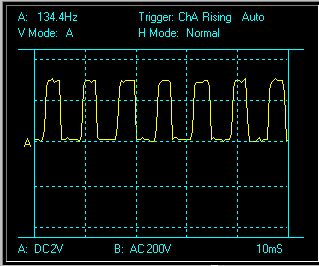
Я так понимаю проблема с разной скоростью вращения левого и правого колеса не решена. Я посмотрел осц: левое колесо, датчик оптопары - дает 154 Гц (osc1_left), правое колесо - 134 Гц (osc2_right). Выравнивание оборотов двигателей механическим путем не поможет. Судя по схеме драйвера двигателей (нашел на форуме при обсуждении сборки робота), есть обратная связь по скорости вращения, это вывод 3, 4 микросхемы драйвера. Вопрос: Кто нибудь пробовал припаяться параллельно R19, R20 и отрегулировать подстроечным резистором обороты двигателей? Я посмотрел осц на двигателях, подается примитивная ШИМ (dc_left_forvard левый двигат, dc_right_forvard правый двигатель), которая не регулируется обратной связью и к тому же мост имеет сквозные токи. Сейчас при программе вперед 5 раз робот уходит вправо по кругу. Решение проблемы или в замене микросхемы драйвера, или в подборе одинаковых двигателей.
Фото:
Робот-шпион. Двигатель и механика dc_left_forvard.jpg [ 21.77 Кб | Просмотров: 2775 ]
Робот-шпион. Двигатель и механика dc_right_forvard.jpg [ 20.46 Кб | Просмотров: 2775 ]
Робот-шпион. Двигатель и механика osc1_left.jpg [ 22.45 Кб | Просмотров: 2775 ]
Робот-шпион. Двигатель и механика osc2_right.jpg [ 23.32 Кб | Просмотров: 2775 ]
Я так понимаю проблема с разной скоростью вращения левого и правого колеса не решена. Я посмотрел осц: левое колесо, датчик оптопары - дает 154 Гц (osc1_left), правое колесо - 134 Гц (osc2_right). Выравнивание оборотов двигателей механическим путем не поможет. Судя по схеме драйвера двигателей (нашел на форуме при обсуждении сборки робота), есть обратная связь по скорости вращения, это вывод 3, 4 микросхемы драйвера. Вопрос: Кто нибудь пробовал припаяться параллельно R19, R20 и отрегулировать подстроечным резистором обороты двигателей? Я посмотрел осц на двигателях, подается примитивная ШИМ (dc_left_forvard левый двигат, dc_right_forvard правый двигатель), которая не регулируется обратной связью и к тому же мост имеет сквозные токи. Сейчас при программе вперед 5 раз робот уходит вправо по кругу. Решение проблемы или в замене микросхемы драйвера, или в подборе одинаковых двигателей.
Переделывал я датчик скорости (замена резисторов R19, R20, R24, R25,) на два подстроечника по 10 кОм робот стал ездить более прямо, но когда задаешь большую дистанцию его все равно уводит в какую нибудь сторону. Я вообще не понимаю зачем нужен этот датчик когда есть оптические по ним можно и скорость определить (измерив частоту) и дистанцию посчитав импульсы.
Скорее всего микросхема драйвера это LED driver regulator contrast, PWM driver от фирм Semtech, NXP. Опто датчиками скорость не отслеживается, проверяется направление вращения двигателя, поэтому два опто датчика на каждый двигатель. Скорость обратной связи намного выше чем скорость приема, обработки и передачи данных по шине IIC. Движение прямо задается по времени, не по опто датчикам. А ШИМ двигателей регулируется непосредственно микросхемой драйвером. IIC LED driver в последнее время очень дешевые. Разработчики использовали управляемый IIC ШИМ регулятор, а надо было использовать ЧИМ (частотно импульсная модуляция). Для доработки прямолинейного движения, надо дополнительно ставить свою электронику, например мк attiny25 которая будет отслеживать разность частот оптодатчиков и блокировать микросхему драйвера.
Последний раз редактировалось AVKrobotics 20 янв 2013, 12:07, всего редактировалось 3 раз(а).
Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять Фото





 . Вопрос закрыт.
. Вопрос закрыт. , разница. И, как бы между прочим, Вы, простите, этот шарик хоть раз в руках держали? Моё субъективное мнение, что нет... Уж извините, если что не так сказал.
, разница. И, как бы между прочим, Вы, простите, этот шарик хоть раз в руках держали? Моё субъективное мнение, что нет... Уж извините, если что не так сказал.